
About TKK


About TKK
Striving to drive change in the world of work with robotic technology, automation
and AI to enhance the potential and efficiency of personnel to be able to work.
fully

Industrial Goods
Industrial Goods
Striving to drive change in the world of work with robotic technology, automation
and AI to enhance the potential and efficiency of personnel to be able to work.
fully

Solutions
Quotation
Shop Industrial Products
News
Work with us

Downloads
Catalogues
Catalogues
กรอกข้อมูลเพื่อรับแคตตาล็อก

Oops! Something went wrong while submitting the form.
เกี่ยวกับ TKK

ประวัติความเป็นมาของ ทีเคเค

พลังขับเคลื่อนองค์กร
โครงสร้างองค์กร
รางวัลแห่งความภาคภูมิใจ
พาร์ทเนอร์และคู่ค้า
ที่ตั้งสำนักงาน
เยี่ยมชม
สินค้าอุตสาหกรรม
Cutting Tools & Machining Tools
Factory Automation
Fluid Transfer & Lubrication
Linear Motion & Bearings
Motors, Gear & Transmission
Panels, Electrical Controls, Cabinets & Wiring
Pneumatics & Hydraulics
Pump, Blower & Vacuum Systems
Sensor & Control Systems
Smart Warehouse & Logistics Robots
งานบริการและโซลูชั่น
ขอใบเสนอราคา
ช้อปสินค้าอุตสาหกรรม
ข่าวสารองค์กร
ร่วมงานกับเรา
ติดต่อเรา
ZIMMER Robot Accessories 2-Jaw Parallel Grippers Series GEP2000
2-Jaw Parallel Grippers Series GEP2000
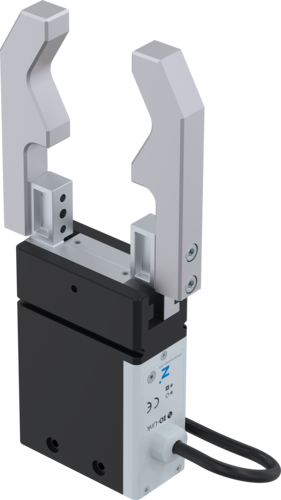
2-Jaw Parallel Grippers Series GEP2000
Designed for flexible and reliable gripping in all environments. GEP2000 grippers feature high durability steel-on-steel guides, compact installation size, and support for IO-Link or digital I/O. Ideal for use with any robot.
สนใจสินค้า
Type
Model :
2-Jaw Parallel Grippers Series GEP2000
Screw diameter for both ends:
Model: Series GEP2000
Applicable fluid:

Features
The electric compact one
- Largest stroke in small installation space
Do you require a large stroke, due to the fact that you are operating either a form fit gripper or a large range of parts but the installation space and the load capacity of your application is limited? Then this gripper is perfect for you! - The simplest activation
It is your choice whether you want to control the gripper by means of I/O ports—like a valve—or if you prefer the version with IO-Link. Both have this in common: they are easy to integrate into your control system. - Positionability via IO-Link
Allows you to position the gripper jaws of the IL-03 and IL-43 variant. In this way, the stroke can be flexibly adapted to the workpiece, which saves time in the process and prevents interfering contours.
Series features
- 10 million maintenance-free cycles (max.)
- Integrated sensing
- IP40
- IP54
- Self locking mechanism
- Magnetic field sensor
- Positionable
- Gripping force adjustable
- IO-Link
- Digital I/O
- Cleanroom-certified
Benefits in detail
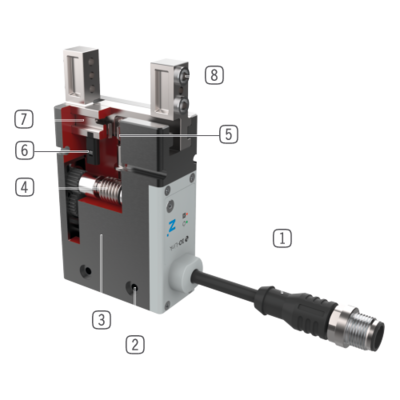
- Control
Via I/O ports (IO) or via IO-Link (IL) - Mounting and positioning
mounting possible from several sides for versatile positioning - BLDC motor
wear-resistant brushless DC motor - Helical worm gear
self locking mechanism in case of power drop - Synchronization
via rack and pinion - Position sensing
Permanent magnet for direct query of jaw movement via magnetic field sensors - Gripper jaw
individual gripper finger mounting - Removable centering sleeves
quick and economical positioning of the gripper fingers
Application






